Автономный автоматический рукомойник

Мировая пандемия COVID-19 без всякого сомнения отразилась на всех сторонах жизни общества. Но одним из следствий этих печальных событий стало снижение количества кишечных инфекций [1], видимо, из-за того, что многие люди начали более тщательно соблюдать санитарные нормы, например, регулярно мыть руки. Однако, строго говоря, при использовании обычного двухвентильного смесителя приходится прикасаться к рукояткам сначала грязными руками, открывая вентили, а затем чистыми, когда требуется перекрыть воду.

Конечно, можно использовать одноразовую салфетку при закрытии вентиля, но чаще всего мы все просто игнорируем это обстоятельство. Несколько лучше обстоит дело, если использовать однорычажный смеситель, который легко закрыть тыльной стороной ладони или локтем. Более современным и радикальным решением проблемы является применение сенсорных кранов и смесителей, которые включаются дистанционно по сигналу от бесконтактного датчика, однако они стоят сравнительно дорого, распространены мало, а их установка требует вторжения в водопроводную систему, что не всегда возможно, к примеру, при проживании на съёмной квартире или при необходимости мыть руки там, где водопровода нет вообще, например, на дачном участке или в гараже.
Исходя из этих соображений, автором было принято решение разработать полностью автономный съемный автоматический рукомойник. Устройство должно при поднесении рук к датчику включать подачу воды из автономного резервуара, а затем автоматически останавливать её подачу через заданный промежуток времени.
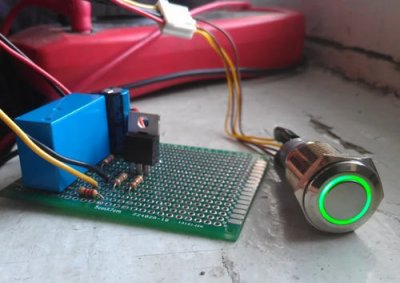
Схема такого устройства показана на рис. 1. Его основа — плата Robotdyn ProMini АТтеда168РА (А2) [2]. являющаяся функциональным аналогом платы Arduino ProMini. В устройстве применена версия платы, рассчитанная на питание напряжением 5 В. Для загрузки программы в память микроконтроллера и обмена информацией с компьютером Robotdyn ProMini используется преобразователь интерфейсов USB-TTL-UART-Serial CH340G. Инфракрасный датчик препятствия МН-В (А1) подключен к порту D12 платы Robotdyn ProMini, следует отметить, что этот датчик потребляет ток около 40 мА при напряжении 5 В, что делает его главным потребителем энергии при работе устройства в дежурном режиме. При обнаружении отражённого от препятствия инфракрасного сигнала на информационном выходе датчика устанавливается низкий логический уровень [3, 4]. Следует отметить, что прямые солнечные лучи или вспышка фотоаппарата способны вызвать ложное срабатывание этого датчика. Для управления электромотором М1 водяного насоса используется готовый релейный модуль А4 на основе реле JQC-3FF-S-Z [5. 6], который подключён к порту D4 платы Robotdyn ProMini. Питание блоков А1, А2 и А4 осуществляется от интегрального стабилизатора напряжения DA1. Стабилизатор DA1 может быть любым, способным обеспечить выходной ток около 200 мА, подойдёт, например, микросхема КР142ЕН5А. Непосредственно рядом с выводами этой микросхемы установлены конденсаторы С1 и С2.
Конденсатор С1 — оксидный К50-35 или импортный, конденсатор С2 — пленочный К73-17. Прямо к выводам модуля А4 припаян оксидный конденсатор СЗ ёмкостью не менее 470 мкФ. При его отсутствии плата Robotdyn ProMini перезагружается в момент срабатывания реле.
Мотор Ml водяного насоса IMM-WATER-PUMP-3V Horizontal Type (WHITE) [7, 8] получает питание от регулируемого понижающего преобразователя напряжения АЗ [9]. Преобразователь настроен на выходное напряжение 6 В, опыт показал, что работа в течение 5... 15 с при таком напряжении питания не приводит к выходу насоса из строя даже при многократном (десятки раз) повторении. Относительно длительная (до десяти минут) непрерывная работа электромотора также не привела к каким-либо проблемам. Мотор М1 является индуктивной нагрузкой, поэтому параллельно с ним включен диод VD2. Искрогасящий конденсатор параллельно диоду VD2 не установлен, так как насос является погружным и непосредственно на клеммах двигателя Ml припаять конденсатор и диод затруднительно, поэтому диод VD2 размещен на плате преобразователя АЗ. в выходной цепи которого штатно установлен оксидный конденсатор ёмкостью 220 мкФ.
Диод VD1 служит для защиты от подачи питания неправильной полярности. Так как устройство предназначено для длительной работы в режиме ожидания без надзора со стороны человека, в цепь питания добавлена плавкая вставка FU1. При включённом насосе потребляемый ток — около 350 мА. Следует отметить, что на модулях ДІАД штатно установлены светодиоды для индикации подачи питания, которые излучают свет постоянно, пока на модуль подаётся напряжение. В целях экономии электроэнергии такие индикаторы с модулей А1, АЗ и А4 удалены. На плате Robotdyn ProMini индикатор питания оставлен на своём месте для того, чтобы можно было легко обнаружить устройство в условиях плохого освещения. Светодиоды-индикаторы срабатывания инфракрасного датчика и электромагнитного реле оставлены на своих местах, так как они излучают свет недолго, только во время работы насоса.
Для работы устройству требуется либо блок питания с максимальным выходным током до 500 мА при напряжении 12 В. либо аккумуляторная батарея с номинальным напряжением 12 В и ёмкостью не менее 1.2 А’Ч. Аккумуляторная батарея ёмкостью 1.2 А*ч обеспечивает автономную работу рукомойника в режиме ожидания в течение одного светового дня, если требуется более длительная автономная работа устройства, следует использовать батарею большей емкости. Возможность питания от аккумуляторной батареи напряжением 12 В позволяет использовать устройство в неэлектрифицированном гараже или на дачном участке.
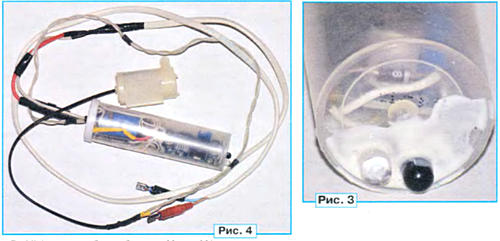
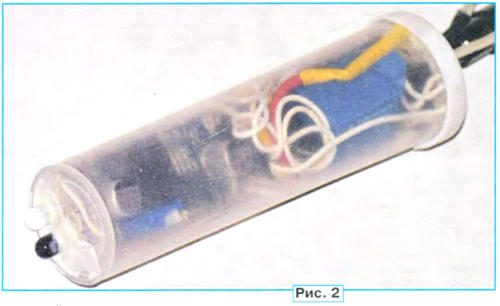
Все элементы устройства, кроме погружного насоса и держателя плавкой вставки FU1, установлены внутри цилиндрического пластмассового корпуса высотой 103 мм и диаметром 28 мм (рис. 2), представляющего собой упаковку от эпоксидного пластилина. Полупрозрачный корпус позволяет наблюдать включение светодиодов. На дне корпуса сделаны два отверстия В крышке корпуса сделано отверстие диаметром 7 мм, через которое выведены наружу кабель питания устройства длиной около 900 мм и кабель питания погружного электронасоса длиной примерно 600 мм (рис. 4).
Алгоритм работы автоматического рукомойника следующий: при всех нечетных включениях насос работает в течение 5 с. что даёт время намочить руки и намылить их, при всех четных включениях вода подаётся 15 с, что позволяет смыть мыло с рук
Рукомойником управляет программа, загруженная в память микроконтроллера на плате Robotdyn ProMini ATmegal68PA В строках 5—14 инициализируются переменные, необходимые для работы устройства. Переменные М = 4. D - 12. L = 13 задают номера используемых портов для реле управления насосом, ИК-датчика препятствия и светодиода-индикатора режима работы соответственно. Переменная val служит для хранения значения, считанного с ИК-датчика. Для отсчёта промежутков времени служат переменные currentTime и loopTime (10, 11], переменные dt1=5000 и dt2= 15000 задают время включения насоса в миллисекундах в первом и втором режимах Логические переменные motor и г необходимы для хранения информации о состояниях насоса и режима его работы.
Функция setup расположена в строках 18—25. где происходит инициализация задействованных портов, в строке 24 происходит принудительное отключение насоса, иначе по умолчанию при подаче питания или перезагрузке платы насос будет работать до первого срабатывания датчика А1. так как на выходе 12 будет присутствовать лог. 0.
Функция loop занимает строки с 28-й по 71 -ю. В строке 32 происходит опрос датчика, затем в строке 34 проверяется условие срабатывания датчика, в строке 36 переменная motor устанавливается в true, данное значение этой переменной является условием продолжения цикла управления работой мотора М1. В строках 37 и 38 записывается текущее значение времени, прошедшего с момента перезагрузки микроконтроллера. В строках 39—66 располагается цикл, который продолжается, пока переменная motor установлена в true
В строке 41 происходит включение насоса В строке 42 снова считывается время, прошедшее с момента перезагрузки микроконтроллера. В строке 44 проверяется, не настала ли очередь первого режима работы насоса (переменная г должна быть false). В строке 46 включается встроенный светодиод на модуле А2, подключенный к порту 13. В строке 47 проверяется, не прошло ли с момента включения насоса 5 с.
Если заданный промежуток времени dt 1 закончился, в строке 49 производится выключение насоса, в строке 50 записывается новое значение в переменную, служащую для измерения интервалов времени. в строке 51 переменная motor устанавливается в false, чтобы прервать выполнение текущего цикла. В строке 52 инвертируется режим работы насоса с тем. чтобы при следующем включении насос работал не пять, а 15 с. Отрезок программы в строках 56—66 служит для управления работой насоса во втором режиме при dt2. равном 15 с, в целом он аналогичен рассмотренному выше участку программы, размещённому с 44-й по 54-ю строку, с тем отличием, что строки 56—66 выполняются при условии, что переменная г установлена в true Во втором режиме светодиод на модуле А2 не включается.
Будучи правильно собранным, устройство начинает работать сразу после записи программы в память микроконтроллера. Налаживание сводится к установке напряжения питания насоса переменным резистором в модуле А4 в интервале от 3 до 6 В, а также к устаблока А1.

По опыту автора, достаточно установить переменным резистором расстояние срабатывания в 30...40 мм. Для работы автоматического рукомойника понадобится шланг с внутренним диаметром 6 мм (соответствующим диаметру патрубка насоса). Длина шланга зависит от места установки ёмкости с водой, у автора длина шланга была примерно 1300 мм, при этом желательно, чтобы перепад высот, на который насос должен поднимать воду, не превышал 250. .300 мм. Внешний вид макета рукомойника на этапе его экспериментальной проверки показан на рис. 5.
Оптимально использовать ёмкость с водой обьёмом 5 .10 л в зависимости от того, как часто планируется использовать рукомойник, ёмкость меньшего объема опорожняется слишком быстро. а более крупная ёмкость требует стационарной установки крепления и решения вопроса с оптимальным способом её заполнения. Теоретически резервуар рукомойника не обязательно заполнять водой, вместо воды можно использовать дезинфицирующую жидкость, превратив прибор из рукомойника в санитайзер, при этом, вероятно, будет разумно уменьшить время работы насоса до 2...3 с в обоих режимах.
Комментарии (0)
Написать



Похожие темы: